La robótica es una disciplina que ha ganado una gran popularidad en los últimos años, no solo entre los ingenieros y científicos, sino también entre los aficionados y estudiantes que buscan adentrarse en el mundo de la automatización y la inteligencia artificial. Con la evolución de las tecnologías y la accesibilidad de componentes como microcontroladores, sensores y motores, la robótica se ha vuelto más accesible que nunca.
En este post, exploraremos 10 proyectos de robótica para principiantes, cada uno diseñado para ser fácil de abordar, pero lo suficientemente desafiante para fomentar el aprendizaje. Desde el montaje básico de un robot móvil hasta la creación de sistemas más complejos, cada proyecto ha sido seleccionado con la intención de brindarte una experiencia completa, permitiéndote entender los principios fundamentales de la robótica.
Ya sea que desees crear robots para tareas simples o explorar conceptos como el control remoto, la automatización y la inteligencia artificial, cada uno de estos proyectos te ofrecerá una lección valiosa. Y lo mejor de todo, ¡puedes realizar estos proyectos con un presupuesto ajustado! Así que, si eres un aficionado o un estudiante que busca aprender de manera práctica, no dudes en sumergirte en el mundo de la robótica con estos proyectos diseñados especialmente para ti.
1. Robot seguidor de línea
Uno de los proyectos de robótica más populares para iniciarse en este campo es el robot seguidor de línea. Este tipo de robot tiene la capacidad de seguir una línea trazada en el suelo, que generalmente es de color negro sobre un fondo blanco. La habilidad de un robot para seguir una línea se basa en el uso de sensores de línea, que detectan el contraste entre el color de la línea y el color del fondo.
Materiales necesarios:
Para construir tu propio robot seguidor de línea, necesitarás algunos materiales básicos, muchos de los cuales son accesibles y económicos para los principiantes. Estos materiales son perfectos para cualquiera que se inicie en los proyectos de robótica:
- Chasis de robot: Puede ser un chasis preconstruido o uno hecho a mano con materiales sencillos.
- Motores y ruedas: Se utilizan para permitir que el robot se mueva.
- Sensor de línea: Estos sensores (generalmente sensores ópticos) detectan el color y el contraste del suelo.
- Placa base o microcontrolador: Un Arduino es ideal para este proyecto, ya que es fácil de programar y tiene suficiente capacidad para controlar los motores y procesar las señales de los sensores.
- Batería: Suficiente para alimentar el robot durante un período de tiempo razonable.
Pasos para construir el robot seguidor de línea:
- Construcción del chasis: Si estás utilizando un chasis prefabricado, este paso puede ser tan simple como ensamblar las piezas. Si decides hacer tu propio chasis, usa materiales ligeros como cartón o plástico para crear una estructura básica que pueda sostener los motores, las ruedas y el microcontrolador.
- Montaje de los motores y las ruedas: En estos proyectos de robótica, como el robot seguidor de línea, es importante tener la integración correcta para asegurar que los componentes de hardware, como el microcontrolador, puedan interactuar de forma fluida. Para ello, en ocasiones es necesario contar con soporte TI que te ayude a configurar correctamente la conexión entre los sensores y el sistema de control.
- Instalación de los sensores de línea: Coloca los sensores de línea en la parte delantera del robot. Estos sensores deben estar alineados con el suelo para poder detectar la línea. La forma en que los sensores se conectan al microcontrolador dependerá de si estás usando un sensor digital o analógico.
- Conexión al microcontrolador: Conecta todos los componentes (motores, sensores, batería) al microcontrolador, como un Arduino. El microcontrolador recibirá las señales de los sensores de línea y, basándose en esa información, ajustará el comportamiento del robot.
- Programación: Este es el paso más crucial y educativo del proyecto. El objetivo de la programación es permitir que el robot detecte cuándo está sobre la línea y cuándo se ha desviado. Aquí es donde entra la lógica de control: el robot debe girar cuando se aleja de la línea y avanzar cuando está sobre ella.
- Pruebas y ajustes: Después de cargar el programa en el microcontrolador, es hora de probar el robot. Coloca una línea de color negro en el suelo y observa cómo reacciona el robot. Si no sigue correctamente la línea, ajusta los sensores o modifica el código para mejorar su rendimiento.
Tal vez te interese: 10 tecnologías emergentes que cambiarán tu vida

2. Robot móvil controlado por bluetooth
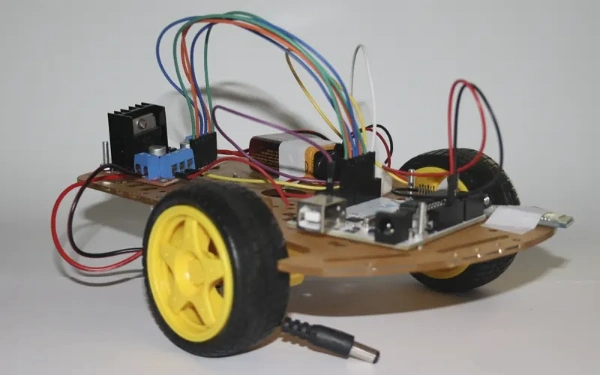
El robot móvil controlado por Bluetooth es uno de los proyectos de robótica ideales para principiantes que quieren experimentar con la movilidad de los robots y el control remoto de manera sencilla y efectiva. En este proyecto, construirás un robot que se puede controlar a través de una aplicación móvil utilizando tecnología Bluetooth.
Materiales necesarios:
Para construir tu propio robot móvil controlado por Bluetooth, necesitarás los siguientes materiales, que son perfectos para iniciarte en los proyectos de robótica:
- Chasis de robot: Al igual que el proyecto anterior, necesitarás una estructura básica para colocar todos los componentes.
- Motores y ruedas: El robot debe ser capaz de moverse, por lo que necesitarás dos o más motores, además de las ruedas correspondientes.
- Módulo Bluetooth (HC-05 o HC-06): Este módulo permite la comunicación entre el robot y la aplicación móvil.
- Placa base o microcontrolador (Arduino, por ejemplo): Un microcontrolador como el Arduino será necesario para recibir las señales del módulo Bluetooth y controlar los motores del robot.
- Batería: Necesitarás una batería para alimentar tanto el Arduino como los motores.
- Aplicación móvil: Puedes utilizar una aplicación preexistente para controlar el robot o incluso desarrollar una sencilla utilizando plataformas como MIT App Inventor o Blynk.
Pasos para construir el robot móvil controlado por Bluetooth:
- Construcción del chasis: Al igual que en el primer proyecto, el primer paso es construir el chasis. Puedes usar un chasis premontado o construir uno propio con materiales simples. Asegúrate de que el chasis sea lo suficientemente grande como para alojar los componentes del robot, incluidos los motores, la placa base, y el módulo Bluetooth.
- Montaje de los motores y las ruedas: Coloca los motores en el chasis y fija las ruedas. Los motores deben ser capaces de mover el robot de manera fluida, así que asegúrate de que estén bien fijados.
- Instalación del módulo Bluetooth: Estos deben conectarse correctamente para que el Arduino pueda comunicarse con el módulo Bluetooth. La correcta instalación de estas conexiones es fundamental y puede requerir consultoría TI si tienes problemas técnicos para establecer la comunicación entre el dispositivo móvil y el robot.
- Conexión del microcontrolador con los motores: A continuación, conecta los motores al microcontrolador de forma que el Arduino pueda controlarlos mediante el envío de señales al módulo de control de motores. El controlador de motores recibe las señales del Arduino y gestiona la dirección y velocidad de los motores.
- Desarrollo o configuración de la aplicación móvil: Si decides crear una aplicación personalizada, plataformas como MIT App Inventor o Blynk te permiten diseñar interfaces simples para controlar tu robot. Generalmente, la aplicación tendrá botones para mover el robot hacia adelante, hacia atrás, y girar en ambas direcciones.
- Programación: El último paso antes de poner en marcha el robot es la programación. El código que se cargará en el microcontrolador debe estar diseñado para recibir señales desde la aplicación móvil a través de Bluetooth. Según los comandos que el robot reciba (por ejemplo, «avanzar», «retroceder», «girar a la izquierda»), el microcontrolador deberá activar los motores de la forma correspondiente.
- Pruebas y ajustes: Una vez todo esté montado y programado, es hora de probar tu robot. Empareja tu dispositivo móvil con el módulo Bluetooth del robot y usa la aplicación para controlar los movimientos. Si el robot no responde como esperas, revisa las conexiones y la programación, realizando ajustes según sea necesario.
3. Brazo robótico básico
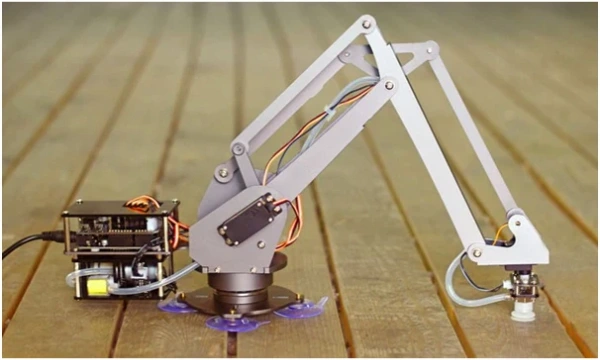
Los brazos robóticos son una de las aplicaciones más conocidas de la robótica, y se utilizan en muchas industrias para realizar tareas precisas, como el ensamblaje, el soldado, la pintura, entre otros. Este tipo de proyectos de robótica te permite explorar cómo los robots pueden interactuar con el mundo físico a través de movimientos controlados.
Materiales necesarios:
Para estos proyectos de robótica, necesitarás los siguientes materiales:
- Servomotores: Estos motores se utilizan para mover las partes del brazo robótico con precisión. Los servos permiten un control exacto de la posición angular.
- Chasis del brazo robótico: Puedes usar un kit de brazo robótico preconstruido o fabricar un brazo básico con piezas de plástico o metal ligero.
- Microcontrolador (Arduino): El Arduino es ideal para controlar los servos y coordinar los movimientos del brazo.
- Fuente de alimentación: Los servomotores generalmente requieren una fuente de alimentación externa, ya que el Arduino por sí solo no puede alimentarlos de manera eficiente.
- Cables y conectores: Para las conexiones eléctricas entre el microcontrolador y los servomotores.
Pasos para construir el brazo robótico básico:
- Construcción del chasis del brazo: El primer paso es montar el brazo robótico. Si estás usando un kit preconstruido, esto será más sencillo, ya que solo necesitarás ensamblar las piezas de acuerdo con las instrucciones. Si decides hacerlo tú mismo, corta y monta las piezas del brazo con materiales ligeros como plástico o madera, asegurándote de que las articulaciones estén alineadas para permitir un movimiento fluido.
- Instalación de los servomotores: Los servomotores son los encargados de mover las diferentes partes del brazo. Generalmente, necesitarás al menos 3 servos para un brazo robótico básico: uno para la base (para rotar el brazo), otro para el codo (para flexionarlo) y otro para la muñeca (para movimientos más finos).
- Conexión al microcontrolador: Conecta los servomotores al microcontrolador, como un Arduino. Cada servo tendrá un pin de control que debe conectarse al Arduino para recibir las señales de control. Además, conecta el suministro de energía para alimentar los servos de manera independiente del Arduino.
- Programación de los movimientos: El siguiente paso es programar el Arduino para controlar los servos. El código debe permitir mover el brazo en diversas direcciones: hacia arriba, hacia abajo, girar, y realizar movimientos más complejos. Este paso es clave en los proyectos de robótica, ya que permite al robot realizar acciones precisas de acuerdo con las órdenes programadas.
- Pruebas y ajustes: Una vez que el brazo esté montado y el código cargado, es hora de probar el robot. Observa cómo se mueven las diferentes partes del brazo y ajusta los ángulos de los servos si es necesario para garantizar que el movimiento sea suave y preciso. Puede que necesites realizar algunos ajustes en la programación para obtener el comportamiento exacto que deseas.
Tal vez te interese: 250 ideas para nombres de empresas de tecnología
4. Robot controlado por voz
El control de voz es una de las interfaces más innovadoras y emocionantes para interactuar con robots. Estos proyectos de robótica te permitirá crear un robot que responde a comandos vocales, lo que te da una introducción práctica al reconocimiento de voz y a la interacción humano-robot. Con el auge de asistentes de voz como Alexa, Google Assistant y Siri, la interacción por voz se ha vuelto más común.
Materiales necesarios:
Para este proyecto, necesitarás los siguientes materiales, todos ellos muy accesibles para los entusiastas de los proyectos de robótica:
- Módulo de reconocimiento de voz: Hay módulos específicos, como el Elechouse Voice Recognition Module, que permiten grabar y reconocer comandos de voz predefinidos.
- Microcontrolador (Arduino o Raspberry Pi): Este servirá como el cerebro del robot, encargado de recibir las señales de los comandos de voz y convertirlos en acciones.
- Motores y ruedas: Como en los proyectos de robótica anteriores, los motores y las ruedas permiten que el robot se mueva.
- Batería: Para alimentar tanto el microcontrolador como los motores.
- Chasis del robot: La estructura básica que sostiene los componentes del robot.
Pasos para construir el robot controlado por voz:
- Montaje del chasis del robot: Al igual que en proyectos de robótica anteriores, comienza construyendo el chasis del robot. Usa materiales ligeros y duraderos, y asegúrate de que el chasis tenga suficiente espacio para alojar todos los componentes. Si ya tienes un robot móvil básico (como el de control Bluetooth), puedes reutilizar el chasis.
- Instalación del módulo de reconocimiento de voz: El siguiente paso es instalar el módulo de reconocimiento de voz. Este módulo suele ser de tamaño pequeño y se conecta al microcontrolador a través de puertos de entrada y salida. Conecta el módulo a tu microcontrolador y asegúrate de que está correctamente alimentado.
- Conexión de los motores al microcontrolador: Al igual que en el proyecto de control Bluetooth, los motores deben conectarse al microcontrolador a través de un controlador de motores. Asegúrate de que el microcontrolador esté programado para manejar las señales de control que se recibirán del módulo de voz.
- Grabación de los comandos de voz: La mayoría de los módulos de reconocimiento de voz te permitirán grabar tus propios comandos, como «avanzar», «retroceder», «girar a la izquierda», «girar a la derecha» y «detenerse». Estos comandos serán almacenados en la memoria del módulo para que puedan ser reconocidos cuando se den por voz.
- Programación de las acciones del robot: El siguiente paso es escribir el código que permitirá que el robot responda a los comandos vocales. Por ejemplo, cuando se diga «avanzar», el robot debe moverse hacia adelante, y cuando se diga «girar a la izquierda», el robot debe girar en esa dirección.
- Pruebas y ajustes: Una vez que el robot esté completamente ensamblado y programado, realiza pruebas para asegurarte de que responde correctamente a los comandos de voz. Si el robot no responde adecuadamente, puede ser necesario ajustar los comandos grabados o revisar las conexiones.

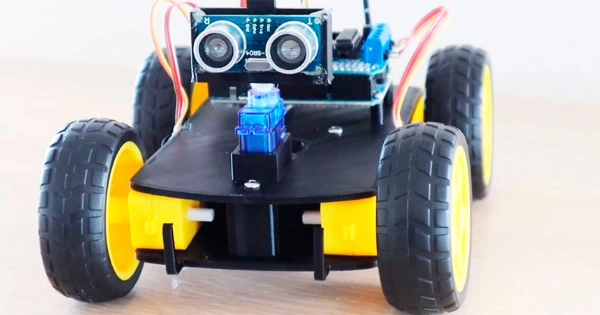
5. Robot que evita obstáculos
En lugar de depender de un control remoto o de comandos preprogramados, el robot tomará decisiones en tiempo real, utilizando sensores para detectar objetos en su camino y ajustar su trayectoria para evitarlos. Este tipo de proyectos de robótica te ayudará a comprender los principios de navegación autónoma y cómo los robots pueden tomar decisiones en función de su entorno.
Materiales necesarios:
Los materiales que necesitarás para estos proyectos de robótica son:
- Chasis del robot: Similar a los proyectos de robótica anteriores, necesitarás un chasis para montar los componentes del robot.
- Motores y ruedas: Los motores se utilizarán para mover el robot, mientras que las ruedas lo mantendrán en movimiento.
- Sensor ultrasónico: Este sensor detecta la proximidad de objetos en el entorno del robot, permitiéndole «ver» los obstáculos y evitar chocar con ellos.
- Placa base o microcontrolador (Arduino o Raspberry Pi): El microcontrolador es el cerebro del robot, controlando los motores y procesando la información recibida por el sensor ultrasónico.
- Batería: Necesitarás una fuente de alimentación adecuada para el robot, que alimente tanto al microcontrolador como a los motores.
Pasos para construir el robot que evita obstáculos:
- Montaje del chasis y los motores: Como en los otros proyectos, el primer paso es montar el chasis y los motores. Asegúrate de que todo esté bien fijado para evitar problemas de estabilidad mientras el robot se mueve.
- Instalación del sensor ultrasónico: El sensor ultrasónico es el componente principal que permitirá al robot detectar obstáculos. Colócalo en la parte frontal del robot, de modo que pueda «ver» el espacio delante de él. Este sensor funciona emitiendo ondas ultrasónicas y midiendo el tiempo que tarda en regresar el eco, lo que le permite calcular la distancia a los objetos cercanos.
- Conexión de los motores al microcontrolador: Al igual que en los proyectos de robótica anteriores, conecta los motores al microcontrolador (como un Arduino) a través de un controlador de motores. Esto permitirá que el microcontrolador envíe señales para activar los motores y mover el robot.
- Conexión del sensor ultrasónico al microcontrolador: El sensor ultrasónico se conecta al microcontrolador para que pueda enviar señales y recibir información sobre la distancia a los obstáculos. El sensor generalmente tiene al menos dos pines: uno para enviar la señal y otro para recibir el eco.
- Programación del comportamiento de evitación de obstáculos: Este es el paso crucial del proyecto. En el código, deberás escribir instrucciones para que el robot lea constantemente la distancia a los objetos que se encuentran en su camino. Si el sensor detecta que hay un objeto a una distancia cercana (por ejemplo, a menos de 10 cm), el robot deberá detenerse o girar para evitar una colisión.
- Pruebas y ajustes: Si el robot no responde como esperas, verifica las conexiones del sensor y ajusta la programación para mejorar la detección y evasión de obstáculos. Esta fase de pruebas es clave en los proyectos de robótica, ya que te permite ajustar y perfeccionar el comportamiento del robot.
Tal vez te interese: Las 35 mejores herramientas digitales para docentes en 2026
6. Robot que sigue sonidos
Un robot que sigue sonidos es una manera innovadora de abordar la navegación en un robot. Este tipo de proyectos de robótica se basa en el uso de sensores de sonido, que detectan las ondas sonoras y permiten que el robot responda a sonidos como voces, aplausos o cualquier otra fuente auditiva.
Materiales necesarios:
Para estos proyectos de robótica, necesitarás los siguientes materiales:
- Chasis del robot: Al igual que en otros proyectos, necesitarás un chasis básico para montar los componentes.
- Motores y ruedas: Los motores y ruedas son necesarios para que el robot pueda moverse hacia la fuente del sonido.
- Micrófono de campo lejano: Un micrófono que permita captar sonidos a una distancia adecuada. Esto puede ser un módulo como el MAX9814.
- Placa base o microcontrolador (Arduino o Raspberry Pi): El microcontrolador es el corazón del robot, encargado de procesar las señales de sonido y controlar los motores.
- Batería: Suficiente para alimentar el microcontrolador, los motores y el micrófono.
Pasos para construir el robot que sigue sonidos:
- Montaje del chasis: Al igual que en los otros proyectos de robótica, comienza ensamblando el chasis y montando los motores y las ruedas. Asegúrate de que todos los componentes estén bien fijados y sean estables para evitar problemas durante el funcionamiento del robot.
- Instalación del micrófono: El micrófono es el componente esencial de este proyecto, ya que será el que detecte los sonidos. Coloca el micrófono en la parte superior del robot para que pueda capturar los sonidos de manera eficiente desde cualquier dirección.
- Conexión del micrófono al microcontrolador: El micrófono debe conectarse al microcontrolador (Arduino o Raspberry Pi) para que pueda enviar señales de audio al sistema. Asegúrate de que el micrófono esté correctamente calibrado para detectar sonidos dentro de un rango de frecuencia adecuado.
- Conexión de los motores al microcontrolador: Como en los proyectos de robótica anteriores, conecta los motores del robot al microcontrolador a través de un controlador de motores. Esto permitirá que el microcontrolador reciba las señales del micrófono y active los motores para mover el robot.
- Programación del robot para seguir sonidos: Este es el paso más complejo, ya que necesitarás programar el microcontrolador para que pueda procesar las señales del micrófono. El robot debe ser capaz de identificar la dirección de la fuente de sonido y mover sus ruedas en esa dirección.
- Pruebas y ajustes: Una vez que el robot esté montado y programado, realiza pruebas en diferentes entornos y con diversas fuentes de sonido. Puede que tengas que ajustar la sensibilidad del micrófono o modificar el código para mejorar la capacidad del robot para seguir la fuente del sonido. Recuerda que el robot debe moverse hacia el sonido y dejar de moverse una vez que esté lo suficientemente cerca.

7. Robot con visión por computadora
A través de cámaras y algoritmos de procesamiento de imágenes, los robots pueden identificar objetos, medir distancias y realizar tareas complejas, como el reconocimiento de patrones, la navegación y la interacción con su entorno. Este tipo de proyectos de robótica es esencial para aquellos que desean llevar sus habilidades en robótica a un nivel más avanzado.
Materiales necesarios:
Los materiales necesarios para estos proyectos de robótica son:
- Chasis del robot: Al igual que en proyectos de robótica anteriores, necesitarás un chasis básico para montar los componentes.
- Motores y ruedas: Los motores y ruedas son fundamentales para que el robot se mueva.
- Cámara: Puedes utilizar una cámara USB estándar o una cámara compatible con Raspberry Pi, como la cámara Pi Camera, que es ampliamente utilizada para proyectos de visión por computadora.
- Placa base o microcontrolador (Raspberry Pi): En lugar de un microcontrolador tradicional como Arduino, en este proyecto necesitarás una Raspberry Pi, ya que tiene suficiente poder de procesamiento para manejar las imágenes de la cámara y ejecutar algoritmos de visión por computadora.
- Batería: Necesitarás una fuente de alimentación adecuada para alimentar tanto la Raspberry Pi como los motores del robot.
Pasos para construir el robot con visión por computadora:
- Montaje del chasis y los motores: El primer paso es montar el chasis y los motores, lo cual es similar a los pasos de los proyectos de robótica anteriores. El chasis debe ser lo suficientemente grande como para alojar tanto la cámara como la Raspberry Pi.
- Instalación de la cámara: Coloca la cámara en la parte frontal del robot, de manera que tenga una visión clara de su entorno. Si estás utilizando una Pi Camera, conéctala a la Raspberry Pi, asegurándote de que esté bien fijada y orientada.
- Conexión de los motores a la Raspberry Pi: Los motores del robot deben conectarse a la Raspberry Pi a través de un controlador de motores. Esto permitirá que la Raspberry Pi envíe señales para activar los motores y mover el robot.
- Configuración de la Raspberry Pi: Configura la Raspberry Pi con el sistema operativo Raspberry Pi OS y asegúrate de instalar todas las bibliotecas necesarias para trabajar con la cámara y la visión por computadora. La biblioteca OpenCV es una de las más populares para realizar tareas de visión por computadora y procesamiento de imágenes, y es crucial para estos proyectos de robótica.
- Programación del algoritmo de visión: Este es el paso principal y más desafiante. En aplicaciones reales, este tipo de visión se usa para automatizar experiencias en espacios públicos, como un bar en Miraflores, donde un robot podría identificar mesas, evitar obstáculos y desplazarse de forma segura entregando pedidos o guiando a clientes.
- Pruebas y ajustes: Una vez que el robot esté montado y el código cargado, realiza varias pruebas. Asegúrate de que el robot pueda ver y procesar correctamente las imágenes en tiempo real. Puedes ajustar el algoritmo según sea necesario para mejorar el rendimiento, como ajustar la sensibilidad del procesamiento de imágenes o calibrar la cámara para obtener mejores resultados.
Tal vez te interese: 5 innovaciones en tecnología educativa para 2026
8. Robot autónomo de exploración
Este tipo de robots se utiliza ampliamente en la investigación científica, la exploración de entornos desconocidos y en aplicaciones como la limpieza de suelos o la inspección de áreas industriales. Estos proyectos de robótica son una excelente oportunidad para adentrarse en la creación de robots autónomos que toman decisiones basadas en datos sensoriales.
Materiales necesarios:
Los materiales necesarios para estos proyectos de robótica son:
- Chasis del robot: Un chasis básico para montar los componentes del robot, que debe ser lo suficientemente grande para alojar todos los sensores y el microcontrolador.
- Motores y ruedas: Los motores y las ruedas permitirán que el robot se mueva por el entorno.
- Sensores de distancia: Sensores como los LIDAR, ultrasónicos o sensores de infrarrojos son necesarios para detectar obstáculos y medir la distancia a los objetos cercanos.
- Microcontrolador (Arduino, Raspberry Pi, o similar): El microcontrolador o la placa base será responsable de procesar la información de los sensores y controlar el movimiento del robot.
- Batería: Necesitarás una fuente de alimentación para el robot, que debe ser suficiente para alimentar el robot durante un tiempo de exploración adecuado.
- Sensor de orientación (opcional): Si deseas mejorar la precisión del movimiento del robot, puedes agregar un sensor de orientación como un compás digital o un IMU (Unidad de Medición Inercial).
Pasos para construir el robot autónomo de exploración:
- Montaje del chasis y los motores: El chasis debe ser lo suficientemente robusto para soportar todos los componentes, y las ruedas deben ser lo suficientemente grandes como para moverse sin problemas en el entorno en el que operará el robot. Este paso es muy similar a otros proyectos de robótica básicos, pero requiere atención a la estabilidad y movilidad del robot.
- Instalación de los sensores de distancia: Coloca los sensores de distancia (como los ultrasónicos o LIDAR) en la parte frontal y lateral del robot para que pueda detectar los obstáculos alrededor. Asegúrate de que los sensores estén posicionados correctamente para proporcionar una cobertura de 360 grados si es necesario.
- Conexión de los sensores al microcontrolador: Dependiendo del tipo de sensor, la conexión puede ser digital o analógica, así que asegúrate de que el microcontrolador esté preparado para recibir y procesar estos datos. Este paso es fundamental para la toma de decisiones autónomas en proyectos de robótica.
- Programación del algoritmo de navegación: Este paso es el corazón del proyecto. Necesitarás programar el microcontrolador para que utilice la información de los sensores de distancia para evitar obstáculos y explorar el entorno de manera eficiente. El algoritmo de navegación generalmente se basa en la detección de obstáculos y la toma de decisiones en tiempo real sobre qué dirección debe tomar el robot.
- Pruebas y ajustes: Una vez que hayas cargado el código y montado todos los componentes, realiza varias pruebas para asegurarte de que el robot puede moverse y explorar de manera autónoma. Puedes colocar el robot en una habitación o área cerrada y observar cómo interactúa con su entorno.

9. Robot de rescate autónomo
El robot de rescate autónomo es uno de los proyectos de robótica diseñados para crear un robot que pueda navegar de manera independiente en un entorno potencialmente peligroso o inaccesible, con el objetivo de localizar víctimas o realizar tareas específicas, como la entrega de suministros.
Materiales necesarios:
Los materiales necesarios para estos proyectos de robótica son:
- Chasis del robot: Un chasis robusto y confiable para montar todos los componentes del robot.
- Motores y ruedas: Motores y ruedas que permitan al robot moverse por el terreno.
- Sensores de distancia: Sensores como LIDAR, ultrasónicos o infrarrojos que ayudan al robot a detectar obstáculos y medir la distancia.
- Cámara o sensores adicionales: Una cámara o sensores como cámaras térmicas o sensores de gas pueden ser útiles para detectar víctimas o peligros adicionales.
- Microcontrolador o placa base (Raspberry Pi, Arduino, o similar): El microcontrolador será el cerebro del robot, encargado de procesar la información de los sensores y controlar el movimiento.
- Batería: Una fuente de energía que permita al robot funcionar durante largos períodos, adecuada para alimentar tanto los sensores como los motores.
Pasos para construir el robot de rescate autónomo:
- Montaje del chasis y los motores: El primer paso es construir el chasis robusto que soporte el peso de los sensores y otros componentes. Asegúrate de que el chasis tenga suficiente espacio para alojar todos los sensores adicionales (como cámaras o sensores térmicos) si los estás utilizando.
- Instalación de los sensores de distancia: Esto permitirá que el robot detecte obstáculos y evite colisiones mientras navega de manera autónoma. Estos sensores son esenciales para la seguridad y la eficiencia en los proyectos de robótica que implican navegación en entornos complejos.
- Adición de sensores de localización: Dependiendo de los objetivos de tu robot, puedes añadir sensores adicionales, como cámaras para capturar imágenes del entorno o cámaras térmicas para detectar personas. Los sensores de gas también pueden ser utilizados si el robot necesita detectar riesgos adicionales en el entorno, como gases tóxicos.
- Conexión de los sensores al microcontrolador: Asegúrate de que las conexiones estén correctamente configuradas para permitir la comunicación entre los sensores y el microcontrolador. La correcta integración de sensores es crucial en los proyectos de robótica que requieren una respuesta en tiempo real.
- Programación del robot: Necesitarás desarrollar un algoritmo que permita que el robot navegue de forma autónoma, evitando obstáculos y tomando decisiones basadas en su entorno. El algoritmo debe permitir la creación de mapas del entorno en tiempo real y tomar decisiones sobre la mejor ruta a seguir. Este tipo de programación es esencial en los proyectos de robótica que requieren habilidades avanzadas de navegación.
- Simulación y pruebas: Antes de poner en marcha el robot en un entorno realista, es recomendable realizar pruebas en un entorno controlado. Puedes crear un área con obstáculos (por ejemplo, un laberinto o una serie de cajas) para simular el tipo de entorno que el robot podría encontrar en una misión de rescate.

10. Robot autónomo con inteligencia artificial
En lugar de seguir instrucciones preprogramadas, un robot con IA puede tomar decisiones complejas basadas en la información que recibe de su entorno, lo que lo hace mucho más dinámico e interactivo. Este tipo de proyectos de robótica es esencial para aquellos que buscan adentrarse en el mundo de los robots inteligentes, donde la autonomía y el aprendizaje son fundamentales.
Materiales necesarios:
Los materiales necesarios para estos proyectos de robótica son:
- Chasis del robot: Un chasis robusto que permita alojar todos los componentes necesarios.
- Motores y ruedas: Los motores y las ruedas para mover el robot.
- Sensores: Sensores como LIDAR, ultrasónicos o cámaras para que el robot perciba su entorno.
- Placa base (Raspberry Pi): La Raspberry Pi es adecuada para este proyecto debido a su capacidad de procesamiento y a su compatibilidad con bibliotecas de IA y aprendizaje automático.
- Batería: Suficiente para alimentar el robot durante períodos prolongados.
Pasos para construir el robot autónomo con IA:
- Montaje del chasis y los motores: Comienza con el montaje básico del chasis y los motores, asegurándote de que todos los componentes estén bien sujetos y que el chasis sea lo suficientemente espacioso para alojar los sensores y la Raspberry Pi.
- Instalación de los sensores: Coloca los sensores en el robot para que pueda percibir su entorno. Puedes utilizar un sensor LIDAR para una detección precisa del entorno o usar sensores ultrasónicos para evitar obstáculos cercanos. También puedes integrar una cámara para que el robot pueda capturar imágenes y analizar visualmente el entorno.
- Instalación de la Raspberry Pi: La Raspberry Pi será el cerebro del robot. Asegúrate de que la Raspberry Pi esté correctamente conectada a los motores y sensores. Además, instala el sistema operativo de Raspberry Pi OS en la tarjeta SD y configura todas las bibliotecas necesarias para el procesamiento de datos.
- Desarrollo de la IA y el aprendizaje automático: El siguiente paso es integrar un algoritmo de inteligencia artificial. Para este proyecto, puedes utilizar bibliotecas de Python como TensorFlow o PyTorch para crear modelos de aprendizaje automático que permitan al robot aprender de su entorno.
- Puedes empezar con un algoritmo básico de aprendizaje por refuerzo, donde el robot «aprende» a través de la prueba y error, optimizando sus acciones basadas en las recompensas que recibe por completar tareas correctamente. Por ejemplo, si el robot navega correctamente alrededor de obstáculos sin chocar, recibe una recompensa, lo que le permite mejorar sus decisiones a lo largo del tiempo.
- Implementación de la toma de decisiones: A medida que el robot explora su entorno, utilizará la IA para tomar decisiones sobre qué hacer a continuación. La programación de la toma de decisiones es un paso clave en los proyectos de robótica, ya que permite que el robot actúe de manera autónoma y eficiente sin intervención humana.
- Pruebas y ajuste del algoritmo de IA: A medida que el robot interactúa con su entorno, es probable que necesites realizar ajustes en el algoritmo de IA para mejorar su rendimiento. Este es un proceso iterativo, donde el robot aprenderá gradualmente de sus experiencias y optimizará sus decisiones con el tiempo.

Conclusión
En este artículo hemos cubierto 10 proyectos de robótica para principiantes, cada uno diseñado para proporcionarte una experiencia de aprendizaje única en el mundo de la robótica. Desde la construcción de un robot seguidor de línea hasta la creación de un robot autónomo con inteligencia artificial, estos proyectos cubren una amplia gama de conceptos clave en la robótica, como la programación de microcontroladores, la integración de sensores, la navegación autónoma y el uso de IA.
Al completar estos proyectos de robótica, no solo habrás adquirido habilidades técnicas valiosas en electrónica, programación y diseño mecánico, sino que también habrás desarrollado una comprensión sólida de cómo funcionan los robots y cómo se pueden aplicar en el mundo real.
